
描述
1、简介
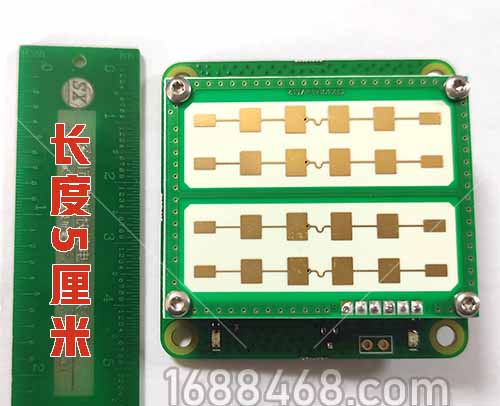
宽波测速雷达是一款面向各类道路、性价比极高的商用微波测速雷达。测速雷达包括天线、信号处理硬件、核心算法等,采用先进的微波技术和测速算法,可准确输出速度,同时产品尺寸极小,施工和维护极为简单。

多普勒雷达测速原理
宽波测速雷达波束宽度16°,通过发射与接收频率为24.15GHz左右的微波来感应物体的存在,运动速度、距离,采用平面微带天线技术,具有体积小、集成化程度高,感应灵敏等特点。
宽波测速雷达是一种可以将微波回波信号转换为一种电信号的装换装置,是雷达测速仪等的核心芯片。

测速雷达测速原理
2、技术参数
1,高灵敏度 探测运动车辆>150米
2,低功耗 <1W (典型值12V @ 75mA )
3,小型化 仅5cm*5cm*2.2cm
4.工作电源电压DC 12V
5,工作频率 24.150GHZ ISM频段
6,发射功率 (EPIR) : 18dBm
7,支持RS232与RS485输出接口 ( 9600bps )
8,支持运动目标(来/去)方向识别
9,测速量程1km/h~240km/h
10,速度测量误差小于+/-1KM/h

测速雷达
3、PIN脚定义
1 : V 电源输入脚 (正) VIN DC 9-24V
2 : G 电源参考地(负)
3 : G RS232参考地
4 : R RS232 接收脚
5 : T RS232 发送脚
6 : G RS485参考地
7 : B RS485 信号B
8 : A RS485 信号A

测速雷达接口
4、通信协议说明
串口通信协议
- 与测速仪连接的RS232通信串口应有下列设置:
- 波特率 9600 比特/秒
- 停止位 1
- 数据位 8
- 奇偶校验 无
- RS485输出格式:
车辆在进入检测区域时触发并给出速度值,共计4个字节,
| FC、FB | 触发信号,用于区别方向,其中FC:正向速度,FB:反向速度 |
| FA、FD | 速度数据包前缀(FC对应FA,FB对应FD) |
| S | 速度值,十六进制,单位KM/H |
| 00 | 内部字节 |
雷达测速是主动模式,不需要给雷达发送特殊命令,当有车辆经过检测区域(不区分来向和去向),并满足设定的限速及信号强度时,雷达会自动给出触发信号。
也就是测来向(反向)车辆。车辆在进入检测区域时,雷达就立刻给出触发信号及速度值,格式如下:

测速雷达RS485协议格式
5、相关设置参数
参数设置需要通过RS232串口设置。 速度数据输出格式(波特率 9600bps 每帧数据包 9 字节):
1: 来向目标
V(ascii) +(ascii) 百位(ascii) 十位(ascii) 个位(ascii) 小数点(ascii) 小数位(ascii) 0X0D 0D0A
2:去向目标
V(ascii) -(ascii) 百位(ascii) 十位(ascii) 个位(ascii) 小数点(ascii) 小数位(ascii) 0X0D 0D0A
RS485 速度数据输出格式(波特率 9600bps 每帧数据包 4 字节) 来向目标速度数据: 0XFC 0XFA sum 0x00
去向目标速度数据: 0XFB 0XFD sum 0x00
注 1:sum 为速度值数据 范围 0X01—0XF0 (对应速度范围 1km/h---240km/h)
注 2: 因 RS485 收发切换 导致可能实际收到的数据是 0XFC 0XFA sum 0x00 0x00
请自行做容错处理
雷达参数设置命令(仅可通过 RS232 设置,波特率 9600bps)
☀ 命 令 A : 0x43 0x46 0x01 aa bb cc 0x0d 0x0a
注 1:aa 为速度量程下限值 (出厂默认为 0X01)
如设置 aa 为 0x05 则小于 5km/h 速度的将不被探测输出
注 2:bb 为雷达波束轴中心与被移动目标(车)运动夹角的角度补偿(出厂默认为 0X00) 如设置 bb 为 0x0a 则角度补偿角度为 10 度
注 3:cc 为雷达灵敏度设置 可设置范围 0x00---0x70 (出厂默认为 0X00) cc 值越小 灵敏度越高 即探测距离越远(抗干扰差);
cc 值越大 灵敏度越低 即探测距离越近(抗干扰强)
(如遇雷达传感器附近有强电台发射天线或者雷达传感器电源波纹系数较大大致的干扰 需要适当提高 cc 取值 提高抗干扰性能,请自行根据应用条件做取舍)
☀ 命 令 B : 0x43 0x46 0x02 Mod Time M/I 0x0d 0x0a
Mod 为 0X00 来去向目标都探测输出
Mod 为 0X01 仅来向目标探测输出
Mod 为 0X02 仅去向目标探测输出
Mod 为 0X03 计量测试模式(命令 C 之抗振动干扰系数对此模式无效)
Time 值越大雷达传感器每秒可测速输出次数越低(Time 出厂默认为 0X00,22FPS 左右响应)。如:43 46 02 00 ff 00 0d 0a 则为最大间隔,约1秒一次。
M/I 为 0X00 速度单位为千米/小时
M/I 为 0X01 速度单位为英里/小时
☀ 命 令 C : 0x43 0x46 0x03 XU 0x00 0x00 0x0d 0x0a
XU 振动干扰之抗干扰系数 范围 0x00 --- 0x70 (出厂默认为 0X00)
注: 振动干扰泛指小摆幅“来去”运动的目标(如喇叭发音或者雷达传感器本身安装支架
的振动又或者电风扇等的干扰);X U 取值范围越大 抗振动摆幅越大,但容易漏掉短行程运动的目标 ,请自行根据应用场景调节做取舍。


